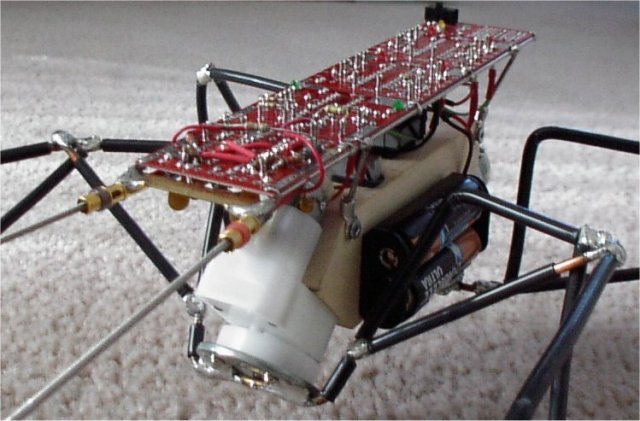
| Gnat was an exercise to design a two motor walker that would be easy for others to duplicate using of-the-shelf parts. Using BEP boards, Bio-Bug motors, standard screws and washers from a hardware store, and a block of light pine for the body.
Its a very powerful walker, clearing 8" every half-step. I had to reinforce the
legs because the 10 gauge-wire could not handle the torque and would lose their
shape. I am going to replace the block of wood with another thats 1-1/2" longer,
which will help give it more stability when climbing an incline, and give more room
to shape the legs which use the body as the leg limits. Once I am happy with that I
will make a proper set of legs that can handle the torque. |